
The concept of the RX.control software, more specifically of the infrastructure software, is based on a particular Architectural Design Pattern, which has proved to be field-robust, see References. Somewhat academically, it is sometimes called a "System of Communicating State Machines".
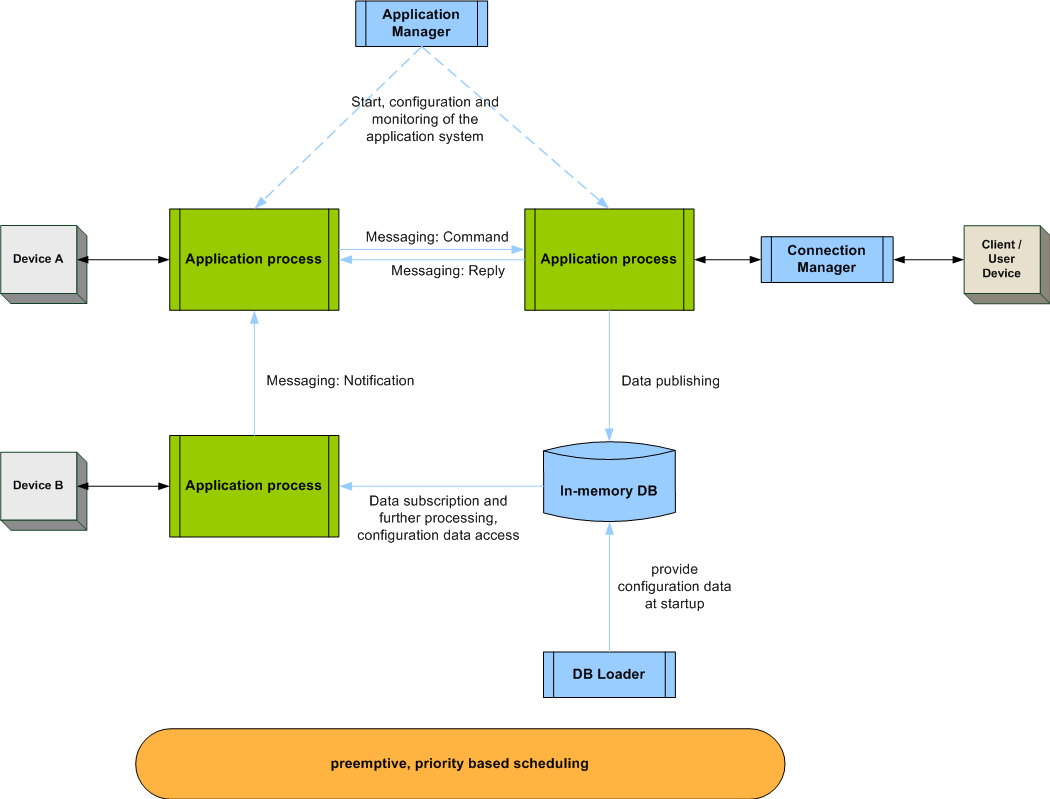
As described under Fields of Application, the pattern refers to the architecture of a distributed application, made from multiple processes that communicate with each other and exchange data. The concept is illustrated in the following diagram. The colors refer to the layers from the Layer Model and show how the RX.control components support the application.
The main characteristics of such an architecture are:
- An application process, for example, implements the control of a device, a particular service, or a step of a data processing chain.
- Several such dedicated processes thus realize the functionality of the overall system in a modular, possibly distributed manner.
- The internal logic of an application process is determined by events that arrive as messages in a message queue and call corresponding handler functions. A state machine defines and manages the operating states of the process being driven by these events.
- Application processes communicate with messages that represent commands, responses, or notifications, and are treated as events by the recipient.
- Application processes publish data in a central in-memory database and read data from other processes from there. The initial configuration of processes is also done in this way. Processes can register themselves for notifications of changes in the database.
- With the concepts of messaging and the central database, the application processes are weakly coupled. The command and data flow can be adjusted by configuration without the need to re-compile the application.
- A central instance - the application manager - starts and configures the system of application processes after central services, such as the in-memory database, the network communication and logging have been initialized.
- At runtime, the application manager monitors the system.